什么是异步编程?
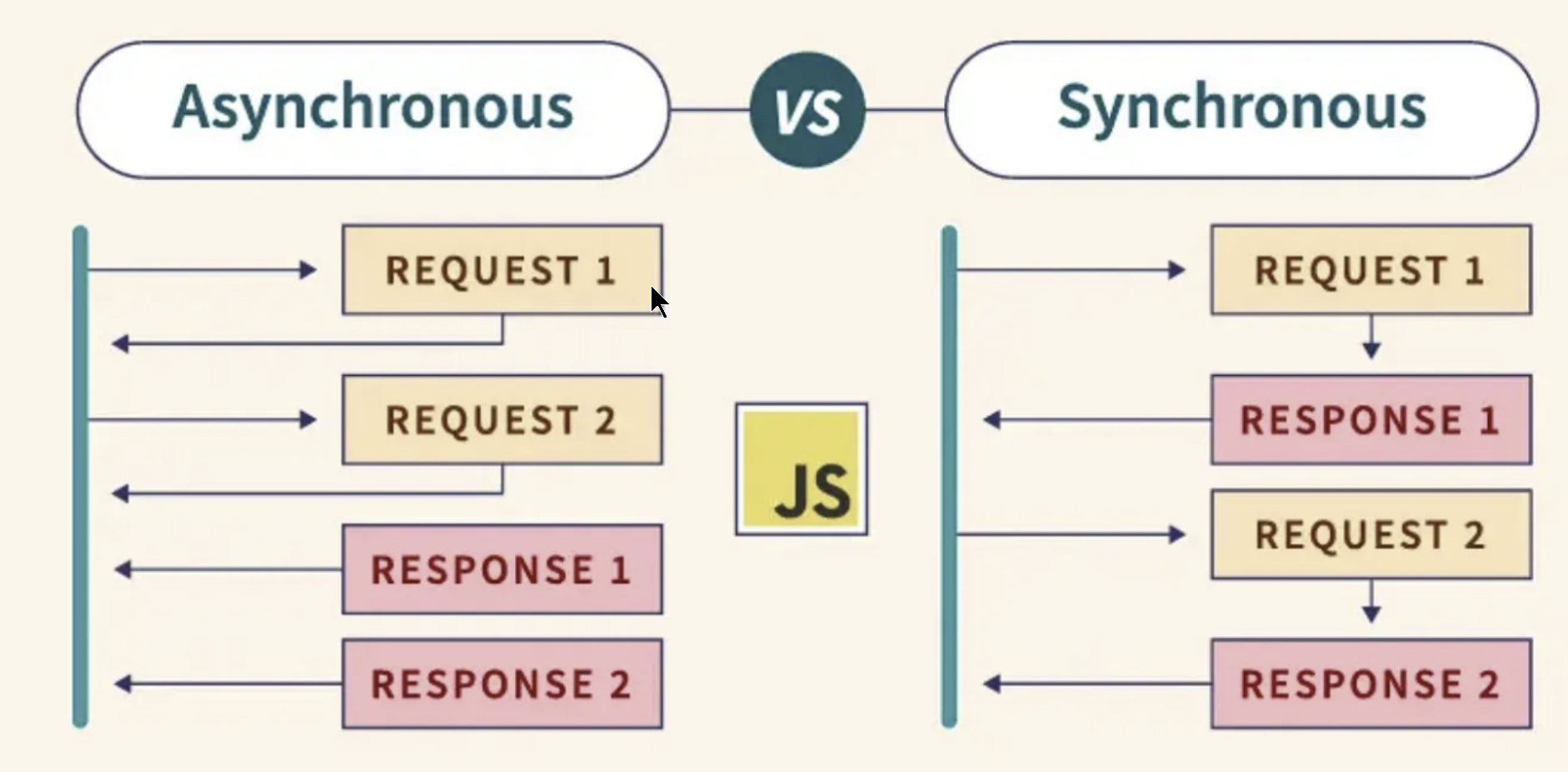
异步编程允许我们在执行一块带有阻塞的代码时,无需等待阻塞完毕,就可以先行跳转其他代码块进行代码的执行。当阻塞恢复时,通过执行器的调度方案,在某一时刻(并不及时)回到之前被阻塞的代码块,进行继续执行。
 通常来说异步编程是并发编程的范畴,而不是并行编程的范畴。异步编程的实现一般依赖于协程,所以异步编程往往并不依赖于内核和硬件的支持,更加依赖于协程的实现。反直觉的事情是,协程起源于汇编语言。
通常来说异步编程是并发编程的范畴,而不是并行编程的范畴。异步编程的实现一般依赖于协程,所以异步编程往往并不依赖于内核和硬件的支持,更加依赖于协程的实现。反直觉的事情是,协程起源于汇编语言。
综上所述,异步编程可以依赖于第三方库,或者我们自己实现一个执行器,并在其中进行自己的调度,这在某些无法多线程的硬件环境中极为有用。
异步编程在使用中极为常见,所以大部分语言都会使用关键字来定义一个异步函数。通常这组关键字为Async/Await。
在Rust中,语言本身只为我们提供了Async/Await这组关键字。并不额外的为我们提供异步运行时,这导致我们想要使用异步时,需要额外的引入运行时库。
协程调度者的策略
协程是一种更轻量级的线程,协程的调度者(executor )是线程中自行实现的一套调度机制运行者。对于系统内核的时间片调度,协程的实现往往采用更简单的方式,例如Golang中的有栈协程goroutine,和在前端广为人知的Promise事件循环以及Python中的generator。
Rust的实现为无栈协程,它的实现方式是通过Future和Task的方式,将协程的状态保存在全局线程区,通过状态机的方式,来实现协程的调度。
有栈协程可以在任意函数中挂起,阻塞恢复时立即接着执行;有栈协程通过遇到阻塞时,将整条函数栈保存到一段空间中(也可能固定当前这段栈空间),并且保存寄存器值,当阻塞恢复时,从空间中恢复栈状态与寄存器状态。优点是任意函数中都可以开辟协程运行。而缺点正是需要资源保存栈、恢复栈。
而无栈协程不能在任意函数中挂起,常见的实现,你只能在async函数中调用无阻塞的await过程。因为我们预设了在async的环境中执行异步,所以我们只需要保存async函数此时的上下文即可。上下文保存在全局线程区,当阻塞恢复的时候,无栈协程不像有栈协程一样恢复所有状态,而是通过状态机,直接执行接下来的程序语句。
我们本文将注重无栈协程的实现,会从最基本的阻塞场景进行探究,我会尽力将一个协程执行器的构建过程讲清楚。
实现部分
本节所有代码,均能通过访问我的
gitea仓库来进行获取。gitea地址
Section1-1 模拟阻塞
我们要实现异步执行时,那么我们就必须模拟一个阻塞的场景,但是我们并不能让代码真正的阻塞。为了能在主线程的事件循环中转移控制权,我们定义一个函数,它的作用是接受一个参数delay_time,在至少经过delay_time时间后,打印一个字符串。
use std::time::{Duration, Instant};#[allow(dead_code)]fn delay_task(delay_time: usize) -> impl Fn() -> () { // 记录当前时间 let start_time = Instant::now(); return move || { if Instant::now() - start_time > Duration::from_secs(delay_time as u64) { println!("已经经过了至少: {:?}秒", delay_time); } };}fn main() { let delay_seconds_time: usize = 5; let task = delay_task(delay_seconds_time); loop { task(); std::thread::sleep(Duration::from_millis(500)); // 休眠500ms }} 上述代码实现了一个最基本的delay_task模拟阻塞的函数,使用了一个闭包来暂存start_time,并且在每次调用时,判断是否已经经过了delay_time时间,如果是则打印字符串。
程序运行后,主线程每500ms会进行一次task()的调用,task()任务被推进。当5s之后,我们会看到每隔500ms打印一次字符串。这并不是我们想要的结果。造成这种问题的原因是我们的主线程并不能知道task()内部的状态,从而选择执行或不执行,接下来我们稍微改进一下代码,来让主线程可以知道task()的状态。
Section1-2 返回状态
use std::time::{Duration, Instant};
#[allow(dead_code)]fn delay_task(delay_time: usize) -> impl Fn() -> bool { // 记录当前时间 let start_time = Instant::now(); return move || { if Instant::now() - start_time > Duration::from_secs(delay_time as u64) { println!("已经经过了至少: {:?}秒", delay_time); return true; } false };}const TIME_PIECE: usize = 500;fn main() { let delay_seconds_time: usize = 5; let task01 = delay_task(delay_seconds_time); let task02 = delay_task(delay_seconds_time * 2); let mut task01_is_done = false; let mut task02_is_done = false; loop { if !task01_is_done { task01_is_done = task01(); } if !task02_is_done { task02_is_done = task02(); } if task01_is_done && task02_is_done { break; } std::thread::sleep(Duration::from_millis(TIME_PIECE as u64)); // 休眠500ms } println!("退出主线程!");} 我们修改了delay_task函数的返回值,现在它能够返回是否执行过一次的状态(虽然并不优雅)。我们还在主线程定义了另一个task02任务,这样我们才能更清楚的看到主线程的执行流程。主线程需要等待task01和task02都执行完毕后才能退出。
我们上面的这段代码存在的问题是,我们的主线程退出的逻辑和task强耦合,并且极度依赖于硬编码写入的中断条件。所以我们再次修改一下代码,让返回值和主线程的退出逻辑分离。
Section1-3 事件循环和任务抽象
use std::{ borrow::BorrowMut, cell::RefCell, rc::Rc, time::{Duration, Instant},};
type TaskStatus = Rc<RefCell<bool>>;
#[allow(dead_code)]fn delay_task(delay_time: usize) -> (impl FnMut() -> (), TaskStatus) { // 记录当前时间 let start_time = Instant::now(); let status = Rc::new(RefCell::new(false)); let mut _status = status.clone(); return ( move || { if !(*_status.borrow()) && (Instant::now() - start_time > Duration::from_secs(delay_time as u64)) { println!("已经经过了至少: {:?}秒", delay_time); _status.borrow_mut().replace(true); } }, status.clone(), );}const TIME_PIECE: usize = 500;pub struct Task<F, T>where F: FnMut() -> T,{ task_poll_fn: F, task_status: TaskStatus,}impl<F, T> Task<F, T>where F: FnMut() -> T,{ pub fn new(mut task_init_fn: impl FnMut() -> (F, TaskStatus)) -> Task<F, T> { let (task_poll_fn, task_status) = task_init_fn(); Task { task_poll_fn, task_status, } }
pub fn run(&mut self) { if !(*self.task_status.borrow()) { (self.task_poll_fn)(); } }}
fn event_loop<F, T>(task_list: &mut Vec<Task<F, T>>)where F: FnMut() -> T,{ loop{ let mut is_all_done = true; for task in task_list.iter_mut() { if !(*task.task_status.borrow()) { is_all_done = false; task.run(); break; } } if is_all_done { break; } std::thread::sleep(Duration::from_millis(TIME_PIECE as u64)); } println!("事件循环退出!");}
fn main() { let mut task_list = vec![]; let delay_seconds_time: usize = 5; task_list.push(Task::new(move || { return delay_task(delay_seconds_time); })); task_list.push(Task::new(move || { return delay_task(delay_seconds_time * 2); })); event_loop(&mut task_list); println!("退出主线程!");} 经过我们的不懈努力,我们的代码越来越抽象了,接下来我们来看看这些新增加的代码都对结构做了什么样的优化。
首先我们定义了一个结构体Task。Task是任务的抽象,它接收一个task_init_fn函数,这个函数的作用是开启并初始化一个任务,并且返回这个任务的推进函数task_pool和任务状态task_status。Task结构体的run方法,会在任务未完成的情况下,调用task_pool函数,推进任务。
其次,我们将原本的任务循环抽象了出来,并创建了一个新的函数event_loop。event_loop接收一个任务列表,它会在任务列表中的任务全部完成后退出。event_loop函数的实现是一个简单的循环,每次循环都会遍历任务列表,如果有任务未完成,就调用任务的run方法,推进任务。如果所有任务都完成了,就退出循环。
Section2-1 标准中的Future
TODO…